We’re about to see a lot of new, powerful, inexpensive medical devices come out. And to my surprise, I’ve contributed to a few of them.
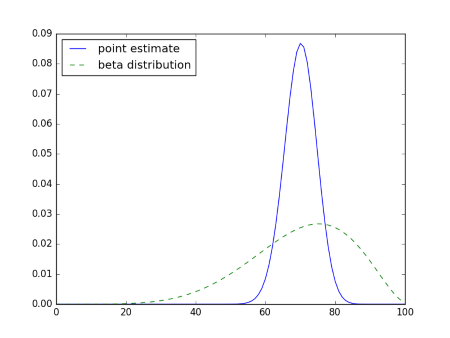
Growing compute power and shrinking sensors open up possibilities we’re only beginning to explore. Even when the things we want to observe elude direct measurement, we may be able to infer them from other things that we can now measure accurately, inexpensively, and in high volume.
In order to infer what you’d like to measure from what you can measure, you need a mathematical model. Or if you’d like to make predictions about the future from data collected in the past, you need a model. And that’s where I come in. Several companies have hired me to help them create medical devices by working on mathematical models. These might be statistical models, differential equations, or a combination of the two. I can’t say much about the projects I’ve worked on, at least not yet. I hope that I’ll be able to say more once the products come to market.
I started my career doing mathematical modeling (partial differential equations) but wasn’t that interested in statistics or medical applications. Then through an unexpected turn of events, I ended up spending a dozen years working in the biostatistics department of the world’s largest cancer center.
After leaving MD Anderson and starting my consultancy, several companies have approached me for help with mathematical problems associated with their idea for a medical device. These are ideal projects because they combine my earlier experience in mathematical modeling with my more recent experience with medical applications.
If you have an idea for a medical device, or know someone who does, let’s talk. I’d like to help.