Let p be a prime number. Then the integers mod p form a finite field.
The number of elements in a finite field must be a power of a prime, i.e. the order q = pn for some n. When n > 1, we can take the elements of our field to be polynomials of degree n − 1 with coefficients in the integers mod p.
Addition works just as you’d expect addition to work, adding coefficients mod p, but multiplication is a little more complicated. You multiply field elements by multiplying their polynomial representatives, but then you divide by an irreducible polynomial and take the remainder.
When n = 2, for some p you can define the field by adding an imaginary unit.
When you can and cannot adjoin an i
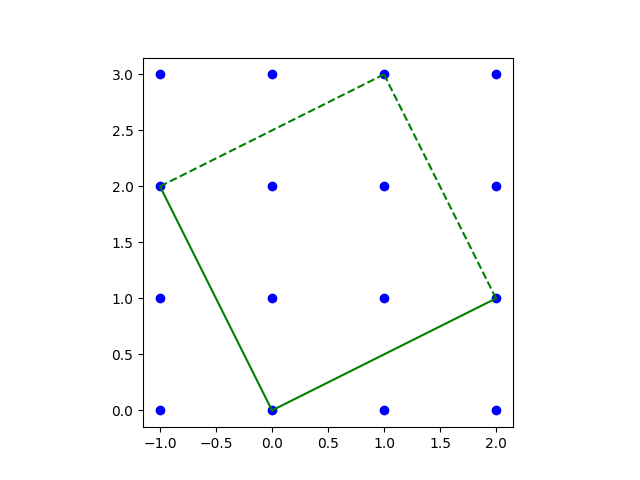
For some finite fields of order p, you can construct a field of order p² by joining an element i to the field, very much the way you form the complex numbers from the real numbers. For example, you can create a field with 49 elements by taking pairs of (a, b) of integers mod 7 and multiplying them as if they were a + bi. So
(a, b) * (c, d) = (ac − bd, ad + bc).
This is equivalent to choosing the polynomial x² + 1 as your irreducible polynomial and following every polynomial multiplication by taking the remainder modulo x² + 1.
This works for a field with 49 elements, but not for a field of 25 elements. That’s because over the integers mod 5 the polynomial x² + 1 already has a root. Two of them in fact: x = 2 or x = 3. So you could say that mod 5, i = 2. Or i = 3 if you prefer. You can still form a field of 25 elements by taking pairs of elements from a field of 5 elements, but you have to choose a different polynomial as your irreducible polynomial because x² + 1 is not irreducible because
x² + 1 = (x − 2)(x + 2)
when working over the integers mod 5. You could use
x² + x + 1
as your irreducible polynomial. To prove that this polynomial is irreducible mod 5, plug in the numbers 0, 1, 2, 3, and 4 and confirm that none of them make the polynomial equal 0.
In general, you can create a field of order p² by adjoining an element i if and only if p = 3 mod 4.
Next we’ll look at an example of making a very large finite field even larger by adding an imaginary element.
Example from Ethereum
The Ethereum virtual machine has support for a pairing—more on that in a future post—of two elliptic curves, BN254 and alt_bn128. The BN254 curve is defined by
y² = x³ + 3
over the field Fp, the integers mod p, where
p = 21888242871839275222246405745257275088696311157297823662689037894645226208583.
The curve alt_bn128 is defined by
y² = x³ + 3/(9 + i)
over the field Fp[i], i.e. the field Fp, with an element i adjoined. Note the that last two digits of p are 83, and so p is congruent to 3 mod 4.
Special point on curve
The Ethereum documentation (EIP-197) singles out a particular point (x, y) on alt_bn128:
x = a + bi
y = c + di
where
a = 10857046999023057135944570762232829481370756359578518086990519993285655852781
b = 11559732032986387107991004021392285783925812861821192530917403151452391805634
c = 8495653923123431417604973247489272438418190587263600148770280649306958101930
d = 4082367875863433681332203403145435568316851327593401208105741076214120093531.
We will show that this point is on the curve as an exercise in working in the field Fp[i]. We’ll write Python code from scratch, not using any libraries, so all the details will be explicit.
def add(pair0, pair1, p):
a, b = pair0
c, d = pair1
return ((a + c) % p, (b + d) % p)
def mult(pair0, pair1, p):
a, b = pair0
c, d = pair1
return ((a*c - b*d) % p, (b*c + a*d) % p)
p = 21888242871839275222246405745257275088696311157297823662689037894645226208583
a = 10857046999023057135944570762232829481370756359578518086990519993285655852781
b = 11559732032986387107991004021392285783925812861821192530917403151452391805634
c = 8495653923123431417604973247489272438418190587263600148770280649306958101930
d = 4082367875863433681332203403145435568316851327593401208105741076214120093531
# Find (e, f) such that (e, f)*(9, 1) = (1, 0).
# 9e - f = 1
# e + 9f = 0
# Multiply first equation by 9 and add.
e = (9*pow(82, -1, p)) % p
f = (-e*pow(9, -1, p)) % p
prod = mult((e, f), (9, 1), p)
assert(prod[0] == 1 and prod[1] == 0)
y2 = mult((c, d), (c, d), p)
x3 = mult((a, b), mult((a, b), (a, b), p), p)
rhs = add(x3, mult((3, 0), (e, f), p), p)
assert(y2[0] == rhs[0])
assert(y2[1] == rhs[1])
Related posts