If the earth were a perfect sphere, “down” would be the direction to the center of the earth, wherever you stand. But because our planet is a bit flattened at the poles, a line perpendicular to the surface and a line to the center of the earth are not the same. They’re nearly the same because the earth is nearly a sphere, but not exactly, unless you’re at the equator or at one of the poles. Sometimes the difference matters and sometimes it does not.
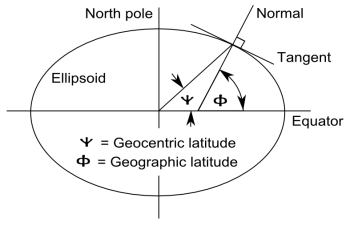
From a given point on the earth’s surface, draw two lines: one straight down (i.e. perpendicular to the surface) and one straight to the center of the earth. The angle φ that the former makes with the equatorial plane is geographic latitude. The angle θ that the latter makes with the equatorial plane is geocentric latitude.
For illustration we will draw an ellipse that is far more eccentric than a polar cross-section of the earth.
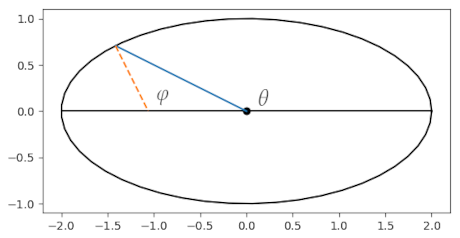
At first it may not be clear why geographic latitude is defined the way it is; geocentric latitude is conceptually simpler. But geographic latitude is easier to measure: a plumb bob will show you which direction is straight down.
There may be some slight variation between the direction of a plumb bob and a perpendicular to the earth’s surface due to variations in surface gravity. However, the deviations due to gravity are a couple orders of magnitude smaller than the differences between geographic and geocentric latitude.
Conversion formulas
The conversion between the two latitudes is as follows.

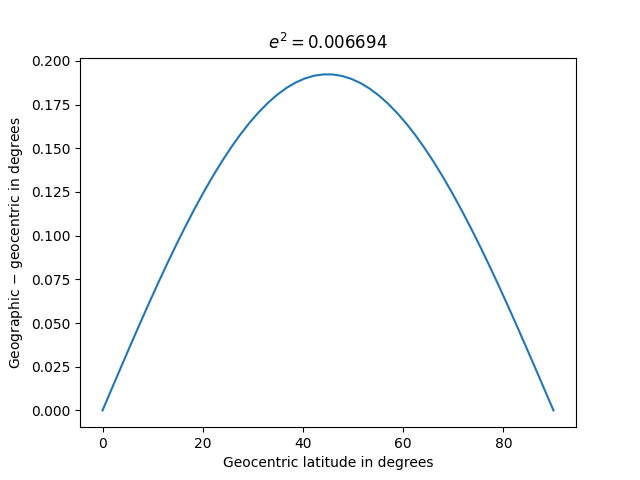
Here e is eccentricity. The equations above work for any ellipsoid, but for earth in particular e² = 0.00669438.
The function atan2(y, x) returns an angle in the same quadrant as the point (x, y) whose tangent is y/x. [1]
As a quick sanity check on the equations, note that when eccentricity e is zero, i.e. in the case of a circle, φ = θ. Also, if φ = 0 then θ = φ for all eccentricity values.
Next we give a proof of the equations above.
Proof
We can parameterize an ellipse with semi-major axis a and semi-minor axis b by
![]()
The slope at a point (x(t), y(t)) is the ratio
![]()
and so the slope of a line perpendicular to the tangent, i.e tan φ, is
![]()
Now
![]()
and so

where e² = 1 − b²/a² is the eccentricity of the ellipse. Therefore
![]()
and the equations at the top of the post follow.
Difference
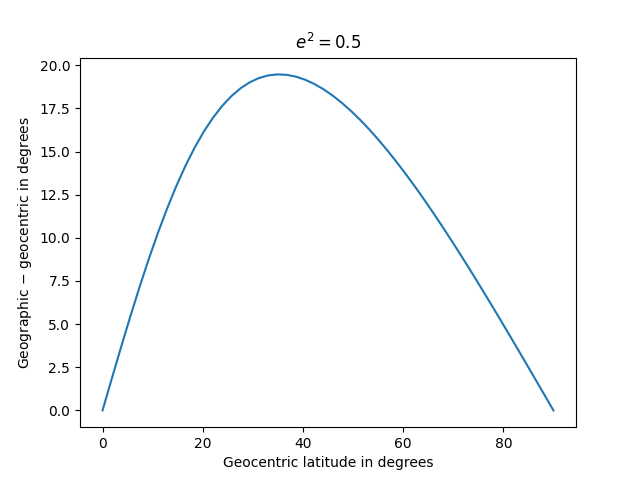
For the earth’s shape, e² = 0.006694 per WGS84. For small eccentricities, the difference between geographic and geocentric latitude is approximately symmetric around 45°.
But for larger values of eccentricity the asymmetry becomes more pronounced.
Related posts
[1] There are a couple complications with programming language implementations of atan2. Some call the function arctan2 and some reverse the order of the arguments. More on that here.