Monte Carlo integration is not as simple in practice as it is often introduced. A homework problem might as you to integrate a function of two variables by selecting random points from a cube and counting how many of the points fall below the graph of the function. This would indeed give you an estimate of the volume bounded by the surface and hence the value of the integral.
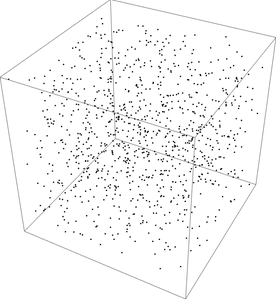
But Monte Carlo integration is most often used in high dimensions, and the region of interest takes up a tiny proportion of a bounding box. In practice you’d rarely sample uniformly from a high-dimensional box. This post will look at sampling points on a (possibly high-dimensional) sphere.
The rate of convergence of Monte Carlo integration depends on the variance of the samples, and so people look for ways to reduce variance. Antipodal sampling is one such approach. The idea is that a function on a sphere is likely to take on larger values on one side of the sphere and smaller values on the other. So for every point x where the function is sampled, it is also sampled at the diametrically opposite point −x on the assumption/hope that the values of the function at the two points are negatively correlated.
Antipodal sampling is a first step in the direction of a hybrid of regular and random sampling, sampling by random choices of regularly spaced points, such as antipodal points. When this works well, you get a sort of synergy, an integration method that converges faster than either purely systematic or purely random sampling.
If a little is good, then more is better, right? Not necessarily, but maybe, so it’s worth exploring. If I remember correctly, Alan Genz explored this. Instead of just taking antipodal points, you could sample at the points of a regular solid, like a tetrahedron. Randomly select and initial point, create a tetrahedron on the sphere with this as one of the vertices, and sample your integrand at each of the vertices. Or you could think of having a tetrahedron fixed in space and randomly rotating the sphere so that the sphere remains in contact with the vertices of the tetrahedron.
If you’re going to sample at the vertices of a regular solid, you’d like to know what regular solids are possible. In three dimensions, there are five: tetrahedron, hexahedron (cube), octahedron, dodecahedron, and icosahedron. Only the first three of these generalize to dimensions 5 and higher, so you only have three choices in high dimension if you want to sample at the vertices of a regular solid.
Here’s more about the cross polytope, the generalization of the octahedron.
If you want more regularly-spaced points on a sphere than regular solids will permit, you could compromise and use points whose spacing is approximately regular, such as the Fibonacci lattice. You could randomly rotate your Fibonacci lattice to create a randomized quasi-Monte Carlo (RQMC) method.
You have a knob you can turn determining the amount of regularity and the amount of randomness. At one extreme is purely random sampling. As you turn the knob you go from antipodes to tetrahedra and up to cross polytopes. Then there’s a warning line, but you can keep going with things like the Fibonacci lattice, introducing some distortion, sorta like turning the volume of a speaker up past the point of distortion.
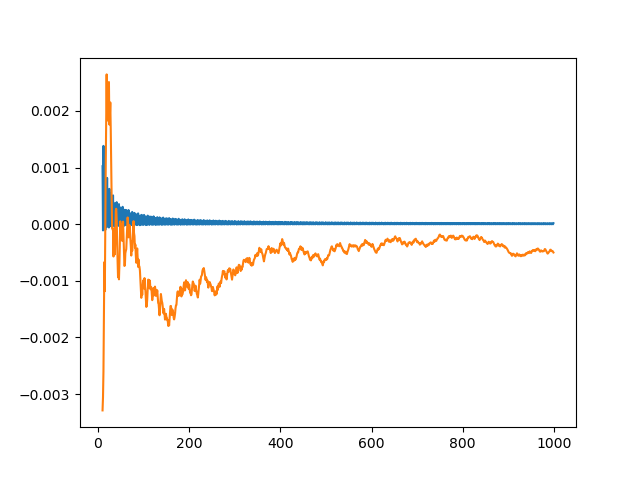
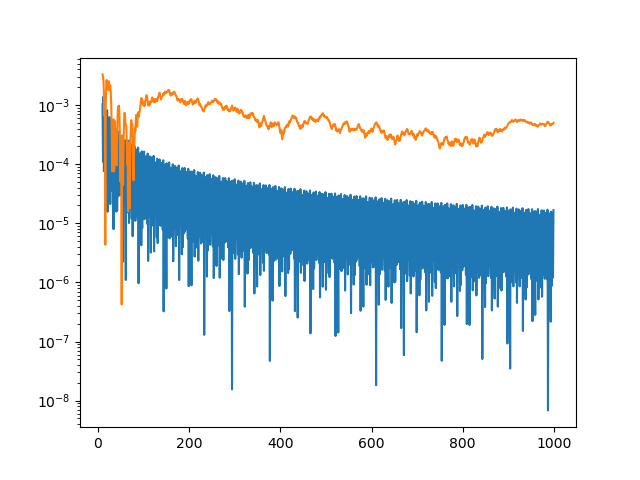
In my experience, I’ve gotten the best results near the random sampling end of the spectrum. Antipodal sampling sped up convergence, but other methods not so much. But your mileage may vary; the results depend on the kind of function you’re integrating.