It’s usually easier to show that a problem has a solution than to show that it does not have a solution.
Analogy with prime numbers
Showing that a number is prime amounts to saying that the problem of finding nontrivial factors has no solution. How could you convince a skeptic that a large number N is prime? If N is small enough that it is possible to divide N by every integer less than √N then that would do it, but that’s not practical if, say, N has 100 digits. Nevertheless there is a way.
Primality certificates are a way to prove that a number is prime, just as demonstrating a factor is a way to prove that a number is not prime. A primality certificate is a set of calculations a skeptic can run that will prove that the number in question is prime. Producing such a certificate takes a lot of computation, but verifying the certificate does not.
I wrote several articles on primality certificates at the beginning of this year. For example, here is one on Pratt certificates and here is one on elliptic curve certificates.
Analogy with convex optimization
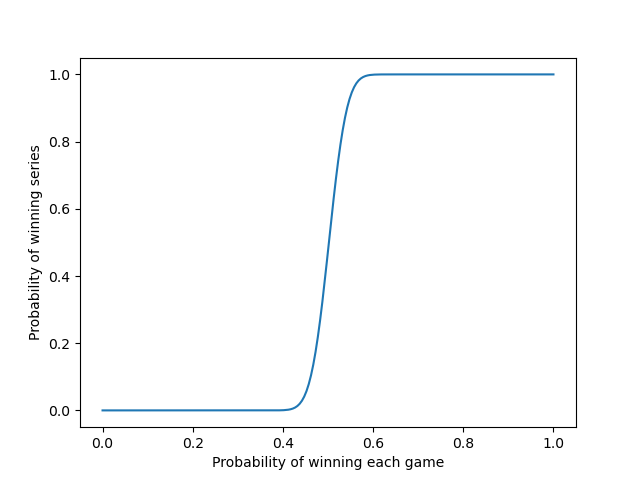
Claiming that you’ve found the maximum value of some function amounts to saying a certain problem has no solution, namely the problem of finding where the function takes on a larger value than the one you claim is optimal. How can you convince a skeptic that you’ve really found the maximum?
You could say “I’ve tried really hard. Here’s a list of things I’ve tried, and see, none of them give a larger value.” Sometimes that’s all you can do. But for convex optimization problems, you can produce a certificate that a skeptic could evaluate that proves that your solution is optimal. More on that here.
Systems of polynomial equations
Now suppose you have a system of polynomial equations. If you’re able to find a solution, then this solution is its own certificate. Want to prove that supposed solution actually is a solution? Plug it in and see.
But how do you prove that you haven’t overlooked any possibilities and there simply isn’t a solution to be found? Once again there is a kind of certificate.
Suppose you have a system of m polynomial equations in n complex variables.

The system of equations has a solution if and only if the algebraic variety generated by the f‘s is non-empty.
If we can find a polynomial combination of the f‘s that equals 1, i.e. we can find g1 through gm such that
![]()
then the variety generated by the f‘s is empty. Such a polynomial combination would be a certificate that the system of equations has no common solution, a certificate of infeasibility. There is an algorithm for finding this polynomial combination, the extended Buchberger algorithm, an analog of the extended Euclidean algorithm.
There is a corresponding theorem for polynomials of a real variable, the so-called positivstellensatz, but it is a little more complicated. The name “complex numbers” is unfortunate because passing to “complex” numbers often simplifies problems.